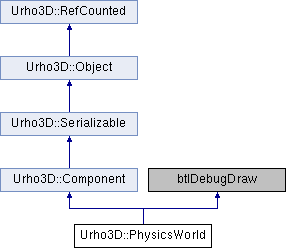
Physics simulation world component. Should be added only to the root scene node.
More...
|
|
| PhysicsWorld (Context *context) |
| | Construct.
|
| |
|
| ~PhysicsWorld () override |
| | Destruct.
|
| |
|
void | SetManualUpdate (bool enabled) |
| | Set whether the physical world is updated manually by external code.
|
| |
|
bool | isVisible (const btVector3 &aabbMin, const btVector3 &aabbMax) override |
| | Check if an AABB is visible for debug drawing.
|
| |
|
void | drawLine (const btVector3 &from, const btVector3 &to, const btVector3 &color) override |
| | Draw a physics debug line.
|
| |
|
void | reportErrorWarning (const char *warningString) override |
| | Log warning from the physics engine.
|
| |
|
void | drawContactPoint (const btVector3 &pointOnB, const btVector3 &normalOnB, btScalar distance, int lifeTime, const btVector3 &color) override |
| | Draw a physics debug contact point. Not implemented.
|
| |
|
void | draw3dText (const btVector3 &location, const char *textString) override |
| | Draw physics debug 3D text. Not implemented.
|
| |
|
void | setDebugMode (int debugMode) override |
| | Set debug draw flags.
|
| |
|
int | getDebugMode () const override |
| | Return debug draw flags.
|
| |
| void | DrawDebugGeometry (DebugRenderer *debug, bool depthTest) override |
| | Visualize the component as debug geometry.
|
| |
|
void | Update (float timeStep) |
| | Step the simulation forward.
|
| |
|
void | CustomUpdate (unsigned numSteps, float fixedTimeStep, float overtime, ea::optional< NetworkFrameSync > sync) |
| | Custom simulation with explicit steps and extrapolation/interpolation time.
|
| |
|
void | UpdateCollisions () |
| | Refresh collisions only without updating dynamics.
|
| |
| void | SetFps (int fps) |
| |
| void | SetGravity (const Vector3 &gravity) |
| |
| void | SetMaxSubSteps (int num) |
| |
| void | SetNumIterations (int num) |
| |
| void | SetUpdateEnabled (bool enable) |
| |
| void | SetInterpolation (bool enable) |
| |
| void | SetInternalEdge (bool enable) |
| |
| void | SetSplitImpulse (bool enable) |
| |
|
void | SetMaxNetworkAngularVelocity (float velocity) |
| | Set maximum angular velocity for network replication.
|
| |
|
void | Raycast (ea::vector< PhysicsRaycastResult > &result, const Ray &ray, float maxDistance, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Perform a physics world raycast and return all hits.
|
| |
|
void | RaycastSingle (PhysicsRaycastResult &result, const Ray &ray, float maxDistance, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Perform a physics world raycast and return the closest hit.
|
| |
| void | RaycastSingleSegmented (PhysicsRaycastResult &result, const Ray &ray, float maxDistance, float segmentDistance, unsigned collisionMask=M_MAX_UNSIGNED, float overlapDistance=0.1f) |
| |
|
void | SphereCast (PhysicsRaycastResult &result, const Ray &ray, float radius, float maxDistance, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Perform a physics world swept sphere test and return the closest hit.
|
| |
|
void | ConvexCast (PhysicsRaycastResult &result, CollisionShape *shape, const Vector3 &startPos, const Quaternion &startRot, const Vector3 &endPos, const Quaternion &endRot, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Perform a physics world swept convex test using a user-supplied collision shape and return the first hit.
|
| |
|
void | ConvexCast (PhysicsRaycastResult &result, btCollisionShape *shape, const Vector3 &startPos, const Quaternion &startRot, const Vector3 &endPos, const Quaternion &endRot, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Perform a physics world swept convex test using a user-supplied Bullet collision shape and return the first hit.
|
| |
|
void | RemoveCachedGeometry (Model *model) |
| | Invalidate cached collision geometry for a model.
|
| |
|
void | GetRigidBodies (ea::vector< RigidBody * > &result, const Sphere &sphere, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Return rigid bodies by a sphere query.
|
| |
|
void | GetRigidBodies (ea::vector< RigidBody * > &result, const BoundingBox &box, unsigned collisionMask=M_MAX_UNSIGNED) |
| | Return rigid bodies by a box query.
|
| |
|
void | GetRigidBodies (ea::vector< RigidBody * > &result, const RigidBody *body) |
| | Return rigid bodies by contact test with the specified body. It needs to be active to return all contacts reliably.
|
| |
|
void | GetCollidingBodies (ea::vector< RigidBody * > &result, const RigidBody *body) |
| | Return rigid bodies that have been in collision with the specified body on the last simulation step. Only returns collisions that were sent as events (depends on collision event mode) and excludes e.g. static-static collisions.
|
| |
| Vector3 | GetGravity () const |
| |
| int | GetMaxSubSteps () const |
| |
| int | GetNumIterations () const |
| |
| bool | IsUpdateEnabled () const |
| |
| bool | GetInterpolation () const |
| |
| bool | GetInternalEdge () const |
| |
| bool | GetSplitImpulse () const |
| |
| int | GetFps () const |
| |
|
float | GetMaxNetworkAngularVelocity () const |
| | Return maximum angular velocity for network replication.
|
| |
|
void | AddRigidBody (RigidBody *body) |
| | Add a rigid body to keep track of. Called by RigidBody.
|
| |
|
void | RemoveRigidBody (RigidBody *body) |
| | Remove a rigid body. Called by RigidBody.
|
| |
|
void | AddCollisionShape (CollisionShape *shape) |
| | Add a collision shape to keep track of. Called by CollisionShape.
|
| |
|
void | RemoveCollisionShape (CollisionShape *shape) |
| | Remove a collision shape. Called by CollisionShape.
|
| |
|
void | AddConstraint (Constraint *constraint) |
| | Add a constraint to keep track of. Called by Constraint.
|
| |
|
void | RemoveConstraint (Constraint *constraint) |
| | Remove a constraint. Called by Constraint.
|
| |
|
void | AddDelayedWorldTransform (const DelayedWorldTransform &transform) |
| | Add a delayed world transform assignment. Called by RigidBody.
|
| |
|
void | DrawDebugGeometry (bool depthTest) |
| | Add debug geometry to the debug renderer.
|
| |
|
void | SetDebugRenderer (DebugRenderer *debug) |
| | Set debug renderer to use. Called both by PhysicsWorld itself and physics components.
|
| |
|
void | SetDebugDepthTest (bool enable) |
| | Set debug geometry depth test mode. Called both by PhysicsWorld itself and physics components.
|
| |
|
btDiscreteDynamicsWorld * | GetWorld () const |
| | Return the Bullet physics world.
|
| |
|
CollisionGeometryDataCache & | GetTriMeshCache () |
| | Return trimesh collision geometry cache.
|
| |
|
CollisionGeometryDataCache & | GetConvexCache () |
| | Return convex collision geometry cache.
|
| |
|
CollisionGeometryDataCache & | GetGImpactTrimeshCache () |
| | Return GImpact trimesh collision geometry cache.
|
| |
|
void | SetApplyingTransforms (bool enable) |
| | Set node dirtying to be disregarded.
|
| |
|
bool | IsApplyingTransforms () const |
| | Return whether node dirtying should be disregarded.
|
| |
|
bool | IsSimulating () const |
| | Return whether is currently inside the Bullet substep loop.
|
| |
|
| Component (Context *context) |
| | Construct.
|
| |
|
| ~Component () override |
| | Destruct.
|
| |
| virtual void | OnSetEnabled () |
| | Handle enabled/disabled state change.
|
| |
| AttributeScopeHint | GetEffectiveScopeHint () const |
| |
| bool | Save (Serializer &dest) const override |
| | Save as binary data. Return true if successful.
|
| |
| bool | SaveXML (XMLElement &dest) const override |
| | Save as XML data. Return true if successful.
|
| |
| bool | SaveJSON (JSONValue &dest) const override |
| | Save as JSON data. Return true if successful.
|
| |
| virtual void | GetDependencyNodes (ea::vector< Node * > &dest) |
| | Return the depended on nodes to order network updates.
|
| |
| virtual bool | HasAuxiliaryData () const |
| |
|
virtual void | SerializeAuxiliaryData (Archive &archive) |
| | Serialize auxiliary data from/to the current block of the archive. May throw ArchiveException.
|
| |
| void | SetEnabled (bool enable) |
| |
|
void | Remove () |
| | Remove from the scene node. If no other shared pointer references exist, causes immediate deletion.
|
| |
| unsigned | GetID () const |
| |
| Node * | GetNode () const |
| |
|
Scene * | GetScene () const |
| | Return the scene the node belongs to.
|
| |
| bool | IsEnabled () const |
| |
| bool | IsEnabledEffective () const |
| |
|
ea::string | GetFullNameDebug () const |
| | Return full component name for debugging. Unique for each component in the scene. Slow!
|
| |
|
Component * | GetComponent (StringHash type) const |
| | Return component in the same scene node by type. If there are several, returns the first.
|
| |
|
template<class T > |
| T * | GetComponent () const |
| | Template version of returning a component in the same scene node by type.
|
| |
|
unsigned | GetIndexInParent () const |
| | Return index of this component in the node.
|
| |
|
| Serializable (Context *context) |
| | Construct.
|
| |
|
| ~Serializable () override |
| | Destruct.
|
| |
| virtual void | OnSetAttribute (const AttributeInfo &attr, const Variant &src) |
| | Handle attribute write access. Default implementation writes to the variable at offset, or invokes the set accessor.
|
| |
|
virtual void | OnGetAttribute (const AttributeInfo &attr, Variant &dest) const |
| | Handle attribute read access. Default implementation reads the variable at offset, or invokes the get accessor.
|
| |
|
virtual ObjectReflection * | GetReflection () const |
| | Return reflection used for serialization.
|
| |
|
virtual const ea::vector< AttributeInfo > * | GetAttributes () const |
| | Return attribute descriptions, or null if none defined.
|
| |
| void | SerializeInBlock (Archive &archive) override |
| | Serialize content from/to archive. May throw ArchiveException.
|
| |
|
void | SerializeInBlock (Archive &archive, bool serializeTemporary) |
| |
| virtual bool | Load (Deserializer &source) |
| | Load from binary data. Return true if successful.
|
| |
| virtual bool | LoadXML (const XMLElement &source) |
| | Load from XML data. Return true if successful.
|
| |
| virtual bool | LoadJSON (const JSONValue &source) |
| | Load from JSON data. Return true if successful.
|
| |
|
virtual bool | Load (const ea::string &resourceName) |
| | Load from binary resource.
|
| |
|
virtual bool | LoadXML (const ea::string &resourceName) |
| | Load from XML resource.
|
| |
|
virtual bool | LoadJSON (const ea::string &resourceName) |
| | Load from JSON resource.
|
| |
|
virtual bool | LoadFile (const ea::string &resourceName) |
| | Load from resource of automatically detected type.
|
| |
| virtual void | ApplyAttributes () |
| | Apply attribute changes that can not be applied immediately. Called after scene load or a network update.
|
| |
|
virtual bool | SaveDefaultAttributes (const AttributeInfo &attr) const |
| | Return whether should save default-valued attributes into XML. Default false.
|
| |
| bool | SetAttribute (unsigned index, const Variant &value) |
| |
|
bool | SetAttribute (const ea::string &name, const Variant &value) |
| | Set attribute by name. Return true if successfully set.
|
| |
|
void | SetInstanceDefault (bool enable) |
| | (Internal use) Set instance-level default flag.
|
| |
|
void | SetInstanceDefault (const ea::string &name, const Variant &defaultValue) |
| | (Internal use) Set instance-level default value. Allocate the internal data structure as necessary.
|
| |
|
virtual Variant | GetInstanceDefault (const ea::string &name) const |
| | (Internal use) Get instance-level default value.
|
| |
|
void | ResetToDefault () |
| | Reset all editable attributes to their default values.
|
| |
|
void | RemoveInstanceDefault () |
| | Remove instance's default values if they are set previously.
|
| |
| void | SetTemporary (bool enable) |
| |
| Variant | GetAttribute (unsigned index) const |
| |
|
Variant | GetAttribute (const ea::string &name) const |
| | Return attribute value by name. Return empty if not found.
|
| |
| Variant | GetAttributeDefault (unsigned index) const |
| |
|
Variant | GetAttributeDefault (const ea::string &name) const |
| | Return attribute default value by name. Return empty if not found.
|
| |
| unsigned | GetNumAttributes () const |
| |
|
void | CopyAttributes (const Serializable *source, bool resetToDefault=true) |
| | Copy all attributes from another serializable.
|
| |
|
SharedPtr< Serializable > | Clone (bool resetToDefault=true) const |
| | Clone this serializable.
|
| |
| bool | IsTemporary () const |
| |
|
| Object (Context *context) |
| | Construct.
|
| |
|
| ~Object () override |
| | Destruct. Clean up self from event sender & receiver structures.
|
| |
| virtual StringHash | GetType () const =0 |
| |
| virtual const ea::string & | GetTypeName () const =0 |
| |
|
virtual const TypeInfo * | GetTypeInfo () const =0 |
| | Return type info.
|
| |
|
virtual bool | IsInstanceOf (StringHash type) const =0 |
| | Check whether current instance implements specified type.
|
| |
|
virtual void | OnEvent (Object *sender, StringHash eventType, VariantMap &eventData) |
| | Handle event.
|
| |
|
template<typename T > |
| bool | IsInstanceOf () const |
| | Check current instance is type of specified class.
|
| |
|
template<typename T > |
| T * | Cast () |
| | Cast the object to specified most derived class.
|
| |
|
template<typename T > |
| const T * | Cast () const |
| | Cast the object to specified most derived class.
|
| |
|
void | SubscribeToEventManual (StringHash eventType, EventHandler *handler) |
| | Subscribe to an event that can be sent by any sender.
|
| |
|
void | SubscribeToEventManual (Object *sender, StringHash eventType, EventHandler *handler) |
| | Subscribe to a specific sender's event.
|
| |
|
template<class T > |
| void | SubscribeToEvent (StringHash eventType, T handler) |
| | Subscribe to an event that can be sent by any sender.
|
| |
|
template<class T > |
| void | SubscribeToEvent (Object *sender, StringHash eventType, T handler) |
| | Subscribe to a specific sender's event.
|
| |
|
void | UnsubscribeFromEvent (StringHash eventType) |
| | Unsubscribe from an event.
|
| |
|
void | UnsubscribeFromEvent (Object *sender, StringHash eventType) |
| | Unsubscribe from a specific sender's event.
|
| |
|
void | UnsubscribeFromEvents (Object *sender) |
| | Unsubscribe from a specific sender's events.
|
| |
|
void | UnsubscribeFromAllEvents () |
| | Unsubscribe from all events.
|
| |
|
void | UnsubscribeFromAllEventsExcept (const ea::vector< StringHash > &exceptions) |
| | Unsubscribe from all events except those listed.
|
| |
|
void | UnsubscribeFromAllEventsExcept (const ea::vector< Object * > &exceptions) |
| | Unsubscribe from all events except those with listed senders.
|
| |
|
void | SendEvent (StringHash eventType) |
| | Send event to all subscribers.
|
| |
|
void | SendEvent (StringHash eventType, VariantMap &eventData) |
| | Send event with parameters to all subscribers.
|
| |
|
VariantMap & | GetEventDataMap () const |
| | Return a preallocated map for event data. Used for optimization to avoid constant re-allocation of event data maps.
|
| |
|
template<typename... Args> |
| void | SendEvent (StringHash eventType, const Args &... args) |
| | Send event with variadic parameter pairs to all subscribers. The parameters are (paramID, paramValue) pairs.
|
| |
|
Context * | GetContext () const |
| | Return execution context.
|
| |
| const Variant & | GetGlobalVar (StringHash key) const |
| |
| const VariantMap & | GetGlobalVars () const |
| |
| void | SetGlobalVar (StringHash key, const Variant &value) |
| |
|
Object * | GetSubsystem (StringHash type) const |
| | Return subsystem by type.
|
| |
|
Object * | GetEventSender () const |
| | Return active event sender. Null outside event handling.
|
| |
|
EventHandler * | GetEventHandler () const |
| | Return active event handler. Null outside event handling.
|
| |
|
bool | HasSubscribedToEvent (StringHash eventType) const |
| | Return whether has subscribed to an event without specific sender.
|
| |
|
bool | HasSubscribedToEvent (Object *sender, StringHash eventType) const |
| | Return whether has subscribed to a specific sender's event.
|
| |
|
bool | HasEventHandlers () const |
| | Return whether has subscribed to any event.
|
| |
|
template<class T > |
| T * | GetSubsystem () const |
| | Template version of returning a subsystem.
|
| |
| const ea::string & | GetCategory () const |
| |
|
void | SendEvent (StringHash eventType, const VariantMap &eventData) |
| | Send event with parameters to all subscribers.
|
| |
|
void | SetBlockEvents (bool block) |
| | Block object from sending and receiving events.
|
| |
|
bool | GetBlockEvents () const |
| | Return sending and receiving events blocking status.
|
| |
|
| RefCounted () |
| | Construct. Allocate the reference count structure and set an initial self weak reference.
|
| |
|
virtual | ~RefCounted () |
| | Destruct. Mark as expired and also delete the reference count structure if no outside weak references exist.
|
| |
|
| RefCounted (const RefCounted &rhs)=delete |
| | Prevent copy construction.
|
| |
|
RefCounted & | operator= (const RefCounted &rhs)=delete |
| | Prevent assignment.
|
| |
| int | AddRef () |
| |
| int | ReleaseRef () |
| |
| int | Refs () const |
| |
| int | WeakRefs () const |
| |
|
RefCount * | RefCountPtr () const |
| | Return pointer to the reference count structure.
|
| |
|
bool | HasScriptObject () const |
| | Return true if script runtime object wrapping this native object exists.
|
| |
|
bool | IsScriptStrongRef () const |
| | Return true if script reference is strong.
|
| |
 Public Member Functions inherited from Urho3D::Component
Public Member Functions inherited from Urho3D::Component